










MAF vs MAP: “Đại chiến” Cảm biến Khí nạp & Sức mạnh Động cơ
Hãy tưởng tượng một động cơ không phải là một khối kim loại vô tri, mà là một vận động...

APPS & TPS: Bí Mật Cặp Cảm Biến Điều Khiển “Hơi Thở” Động Cơ
Từ Mệnh Lệnh Đến Hành Động: Giải Mã 'Cặp Bài Trùng' Cảm biến Vị trí Bàn đạp ga (APPS) và...

Shock vs Strut: Phân Biệt Giảm Chấn & Thanh Chống Chuẩn Kỹ Thuật
Giảm Chấn (Shock) vs. Thanh Chống (Strut): Cuộc Đối Đầu "Nảy Lửa" Dưới Gầm Xe Mà 90% Người Dùng Vẫn...

Didi Chuxing & Robotaxi: Giải Mã Chiến Lược Thống Trị Tương Lai
1: Không Chỉ Là Một Ứng Dụng Gọi Xe Mỗi ngày, trên nền tảng của Didi Chuxing, hàng chục triệu...
Drivability là gì? 9 Dấu Hiệu Bắt Bệnh Vận Hành Ô Tô
Khi chúng ta nói về một chiếc xe "ngon", chúng ta không chỉ nói về tốc độ tối đa trên...

Máy Phát Điện Ô Tô Hỏng? Hướng Dẫn Chẩn Đoán Sớm Tại Nhà
Trong hệ thống điện của một chiếc ô tô, nếu ắc quy là "lá phổi" cung cấp hơi thở ban...

An Toàn Lốp Xe: Cẩm Nang Toàn Diện Từ A-Z
Trong thế giới xe cộ, người ta thường say sưa bàn về mã lực, momen xoắn, khả năng tăng tốc...

Mã Hóa Lương Tri: Bài Toán Đạo Đức Nan Giải Của Xe Tự Hành
1: Tình Huống Nan Giải Ngoài Ngã Tư Đường Hãy tạm quên đi "Bài toán Trolley" (Trolley Problem) kinh điển...
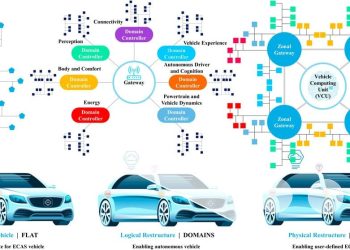
Xe Tự Hành


Copyright © 2025 EnterKnow. Liên hệ quảng cáo: 0935247688