Cảm biến lambda xác định hàm lượng oxy còn lại trong khí thải và cung cấp cho bộ điều khiển động cơ tín hiệu điện để kiểm soát tỷ lệ không khí-nhiên liệu. Bài viết này, EnterKnow sẽ tìm hiểu về các biến thể, cách hoạt động của cảm biến lambda.
Cảm biến lambda (hay cảm biến oxy, trong đó lambda đề cập đến tỷ lệ tương đương không khí-nhiên liệu, thường được ký hiệu là λ) là một thiết bị điện tử đo tỷ lệ oxy (O2) trong khí thải của động cơ đốt trong.

Nguyên lý chức năng của cảm biến Lambda
Cần có quá trình đốt cháy tối ưu để đảm bảo hiệu suất nhiên liệu, công suất động cơ và tốc độ chuyển đổi lý tưởng của bộ chuyển đổi xúc tác. Trong trường hợp động cơ xăng, điều này đạt được nhờ tỷ lệ không khí-nhiên liệu là 14,7 kg không khí trên 1 kg nhiên liệu (hỗn hợp cân bằng hóa học). Hỗn hợp tối ưu này được ký hiệu bằng chữ Hy Lạp λ (lambda). Lambda được sử dụng để biểu thị tỷ lệ không khí giữa nhu cầu không khí lý thuyết và lưu lượng không khí thực tế được cung cấp:
λ = lưu lượng khí cung cấp : lưu lượng khí lý thuyết = 14,7 kg : 14,7 kg = 1
Nguyên lý cảm biến lambda dựa trên phép đo so sánh oxy. Điều này có nghĩa là hàm lượng oxy còn lại trong khí thải (khoảng 0,3 – 3%) được so sánh với hàm lượng oxy trong không khí xung quanh (khoảng 20,8%).
Nếu hàm lượng oxy còn lại trong khí thải là 3 % (hỗn hợp nghèo) thì có điện áp 0,1 V do chênh lệch so với hàm lượng oxy của không khí xung quanh.
Nếu hàm lượng oxy còn lại nhỏ hơn 3 % (hỗn hợp giàu), điện áp cảm biến sẽ tăng lên 0,9 V tương ứng với mức chênh lệch tăng lên. Hàm lượng oxy còn lại được đo bằng nhiều cảm biến lambda khác nhau.
Điểm đặt lý tưởng là khoảng 0,45 V (450 mV) DC. Đây là nơi lượng không khí và nhiên liệu ở tỷ lệ tối ưu, chênh lệch ~ 0,5% so với điểm cân bằng hóa học, sao cho khí thải thải ra chứa lượng carbon monoxide tối thiểu.
Chức năng của cảm biến lambda thường được kiểm tra trong quá trình kiểm tra khí thải định kỳ. Tuy nhiên, vì nó có thể bị mài mòn ở một mức độ nhất định nên cần được kiểm tra định kỳ để đảm bảo rằng nó hoạt động bình thường (khoảng 30.000 km một lần) như một phần của cuộc kiểm tra.
Đầu dò cảm biến Lambda
Phần tử cảm biến là một trụ gốm được mạ bên trong và bên ngoài với các điện cực bạch kim xốp; toàn bộ được bảo vệ bởi một miếng gạc kim loại. Nó hoạt động bằng cách đo sự chênh lệch nồng độ oxy giữa khí thải và không khí bên ngoài và tạo ra điện áp hoặc thay đổi điện trở tùy thuộc vào sự chênh lệch giữa hai bên.
Các cảm biến chỉ bắt đầu hoạt động hiệu quả khi được làm nóng đến khoảng 316 °C (600 °F), vì vậy hầu hết các đầu dò lambda mới hơn đều có bộ phận làm nóng được bọc trong gốm giúp đưa đầu gốm lên nhiệt độ nhanh chóng. Các đầu dò cũ hơn, không có bộ phận làm nóng, mà cần phải được làm nóng bởi khí thải, nhưng sẽ cần một khoảng thời gian trễ từ khi động cơ khởi động đến khi các bộ phận trong hệ thống xả đạt đến trạng thái cân bằng nhiệt. Khoảng thời gian cần thiết để khí thải đưa đầu dò về nhiệt độ tối ưu phụ thuộc vào nhiệt độ của không khí xung quanh và hình dạng của hệ thống xả. Nếu không có gia nhiệt, quá trình này có thể mất vài phút. Có những vấn đề ô nhiễm được cho là do quá trình khởi động chậm này, bao gồm cả vấn đề tương tự với nhiệt độ làm việc của bộ chuyển đổi xúc tác.
Đầu dò điện áp – Voltage jump probe – Zirconia sensor
Đầu dò này bao gồm một phần tử gốm zirconium dioxide rỗng, hình ngón tay. Đặc điểm đặc trưng của chất điện phân rắn này là nó có thể cho phép các ion oxy xuyên qua ở nhiệt độ cao hơn khoảng 300 °C. Cả hai mặt của gốm được phủ một lớp bạch kim mỏng, xốp, hoạt động như một điện cực. Khí thải chảy qua bên ngoài bộ phận gốm, bên trong nó chứa đầy không khí tham chiếu.
Cảm biến zirconium dioxide, hay zirconia, lambda dựa trên pin nhiên liệu điện hóa trạng thái rắn gọi là tế bào Nernst. Hai điện cực của nó cung cấp điện áp đầu ra tương ứng với lượng oxy trong khí thải so với lượng oxy trong khí quyển.
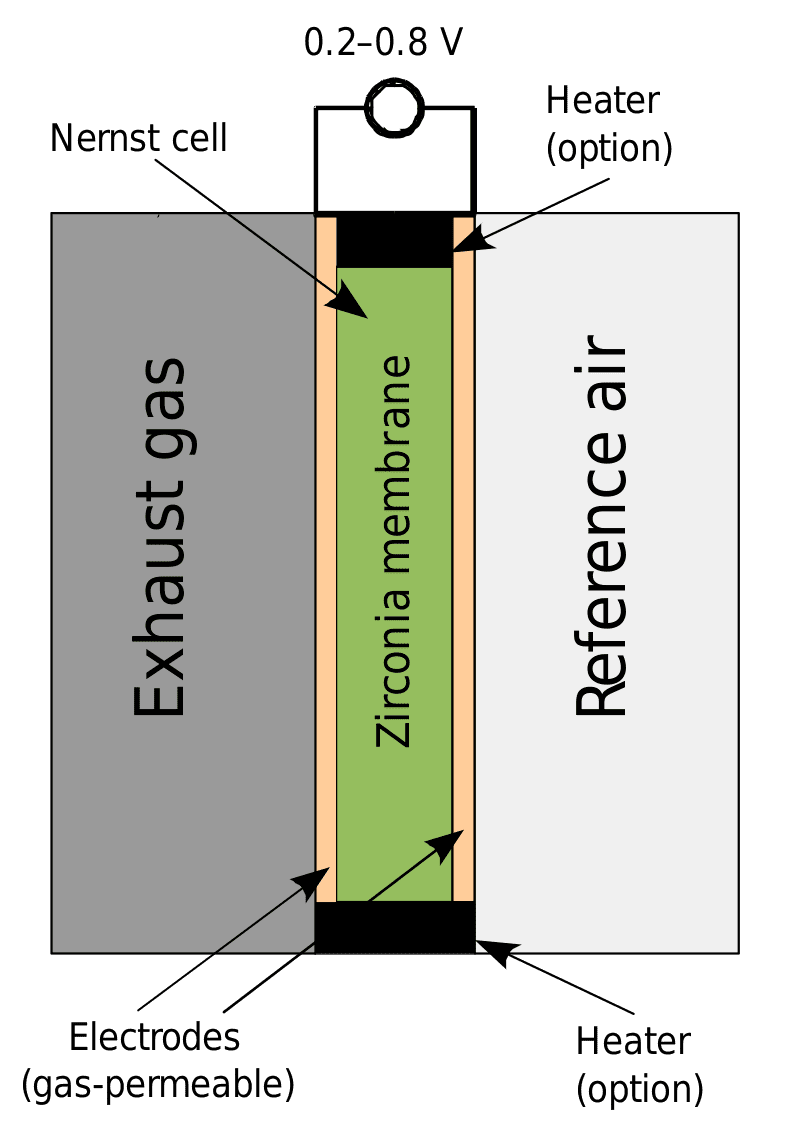
Đặc tính của phần tử gốm là khi nồng độ oxy khác nhau ở cả hai mặt gây ra sự di chuyển của các ion oxy, từ đó tạo ra điện áp. Điện áp này được sử dụng làm tín hiệu cho bộ điều khiển, bộ điều khiển này thay đổi tỷ lệ không khí-nhiên liệu tùy thuộc vào hàm lượng oxy dư trong khí thải.
Quá trình đo hàm lượng oxy còn lại và làm cho hỗn hợp giàu hơn hoặc loãng hơn được lặp lại vài lần trong một giây, tạo ra hỗn hợp dựa trên nhu cầu (λ = 1).
Điện áp do cảm biến tạo ra là phi tuyến tính đối với nồng độ oxy. Cảm biến nhạy nhất ở gần điểm cân bằng hóa học (trong đó λ = 1) và kém nhạy hơn khi rất nghèo hoặc rất giàu.
ECU là hệ thống điều khiển sử dụng phản hồi từ cảm biến để điều chỉnh hỗn hợp nhiên liệu/không khí. Như trong tất cả các hệ thống điều khiển, hằng số thời gian của cảm biến rất quan trọng; khả năng điều khiển tỷ lệ nhiên liệu-không khí của ECU phụ thuộc vào thời gian phản hồi của cảm biến. Cảm biến cũ hoặc bị bẩn có xu hướng có thời gian phản hồi chậm hơn, điều này có thể làm giảm hiệu suất hệ thống. Khoảng thời gian càng ngắn thì hệ thống càng phản hồi nhanh hơn.
Cảm biến có cấu trúc bằng thép không gỉ chắc chắn bên trong và bên ngoài. Do đó, cảm biến có khả năng chống ăn mòn cao, cho phép sử dụng hiệu quả trong môi trường khắc nghiệt với nhiệt độ/áp suất cao.
Cảm biến zirconia thuộc loại “băng hẹp” (narrow-band), đề cập đến phạm vi hẹp của tỷ lệ nhiên liệu/không khí mà nó phản ứng.
Đầu dò điện trở – Resistance jump probe – Titania sensor

Trên loại cảm biến này, phần tử gốm được làm từ titan dioxide sử dụng công nghệ màng dày, nhiều lớp. Một đặc tính của titan dioxide là điện trở của nó thay đổi tỷ lệ với nồng độ oxy trong khí thải. Với hàm lượng oxy cao hơn (hỗn hợp nghèo λ > 1) nó dẫn điện kém hơn, với hàm lượng oxy thấp hơn (hỗn hợp giàu λ < 1) nó trở nên dẫn điện tốt hơn. Đầu dò này không yêu cầu bất kỳ không khí tham chiếu nào, nhưng phải được bộ điều khiển cung cấp điện áp 5 V thông qua tổ hợp các điện trở. Tín hiệu cần thiết cho bộ điều khiển được tạo ra do sự sụt giảm điện áp ở các điện trở. Điện trở của Titania là một hàm của áp suất riêng phần oxy và nhiệt độ. Do đó, một số cảm biến được sử dụng cùng với cảm biến nhiệt độ khí để bù cho sự thay đổi điện trở do nhiệt độ. Giá trị điện trở ở mọi nhiệt độ là khoảng 1/1000 sự thay đổi nồng độ oxy. Tuy nhiên, ở λ = 1, có sự thay đổi lớn về oxy, do đó sự thay đổi điện trở thường là 1000 lần giữa giàu và nghèo, tùy thuộc vào nhiệt độ.
Vì Titania là chất bán dẫn loại N có cấu trúc TiO2−x, nên các khuyết tật x trong mạng tinh thể sẽ dẫn điện. Vì vậy, đối với khí thải giàu nhiên liệu (nồng độ oxy thấp hơn) điện trở thấp và đối với khí thải nghèo nhiên liệu (nồng độ oxy cao hơn) điện trở cao. Bộ điều khiển cung cấp cho cảm biến một dòng điện nhỏ và đo sự sụt giảm điện áp trên cảm biến, thay đổi từ gần 0 volt đến khoảng 5 volt. Giống như cảm biến zirconia, loại này là phi tuyến tính, do đó đôi khi nó được mô tả đơn giản như một chỉ báo nhị phân, đọc giá trị “giàu” hoặc “nghéo”. Cảm biến Titania đắt hơn cảm biến zirconia nhưng chúng cũng phản hồi nhanh hơn.
Trong các ứng dụng ô tô, cảm biến Titania, không giống như cảm biến zirconia, không yêu cầu mẫu không khí tham chiếu để hoạt động bình thường. Điều này làm cho việc thiết kế cụm cảm biến chống ô nhiễm nước trở nên dễ dàng hơn. Trong khi hầu hết các cảm biến ô tô đều có thể chìm được, thì cảm biến dựa trên zirconia yêu cầu nguồn cung cấp không khí tham chiếu rất nhỏ từ khí quyển, do đó việc làm kín mà vẫn có không khí tham chiếu là một thách thức lớn.
Cảm biến lambda băng thông rộng
Cảm biến lambda hiển thị hỗn hợp giàu hoặc nghèo trong phạm vi λ = 1. Cảm biến lambda băng thông rộng cung cấp tùy chọn đo tỷ lệ không khí chính xác ở cả phạm vi nghèo (λ > 1) và giàu (λ < 1). Nó cung cấp tín hiệu điện chính xác và do đó có thể kiểm soát mọi giá trị tham chiếu. Giống như đầu dò thông thường, cảm biến lambda băng thông rộng cũng so sánh từ không khí tham chiếu. Nó còn có một tế bào điện hóa thứ hai: Tế bào bơm (pump cell).
Một biến thể của cảm biến zirconia, được gọi là cảm biến “băng rộng”, được NTK giới thiệu vào năm 1992 và được sử dụng rộng rãi cho các hệ thống quản lý động cơ ô tô nhằm đáp ứng nhu cầu ngày càng tăng về tiết kiệm nhiên liệu tốt hơn, lượng khí thải thấp hơn và hiệu suất động cơ tốt hơn cùng một lúc. Nó dựa trên thành phần zirconia phẳng nhưng cũng kết hợp với bơm khí điện hóa. Một mạch điện tử chứa vòng phản hồi điều khiển dòng bơm khí để giữ cho đầu ra của tế bào điện hóa không đổi, sao cho dòng điện của bơm biểu thị trực tiếp hàm lượng oxy trong khí thải. Cảm biến này loại bỏ vấn đề hoạt động cục bộ ở phạm vi giàu hoặc nghèo vốn có trong các cảm biến dải hẹp, cho phép bộ điều khiển điều chỉnh việc cung cấp nhiên liệu và thời điểm đánh lửa của động cơ nhanh hơn nhiều.
Trong ngành công nghiệp ô tô, cảm biến này còn được gọi là cảm biến UEGO (oxy khí thải phổ quát). Cảm biến UEGO cũng thường được sử dụng trong điều chỉnh dyno hậu mãi và thiết bị hiển thị nhiên liệu không khí điều khiển hiệu suất cao. Cảm biến zirconia băng rộng được sử dụng trong hệ thống phun nhiên liệu phân tầng và hiện nay cũng có thể được sử dụng trong động cơ diesel để đáp ứng giới hạn phát thải EURO và ULEV sắp tới.
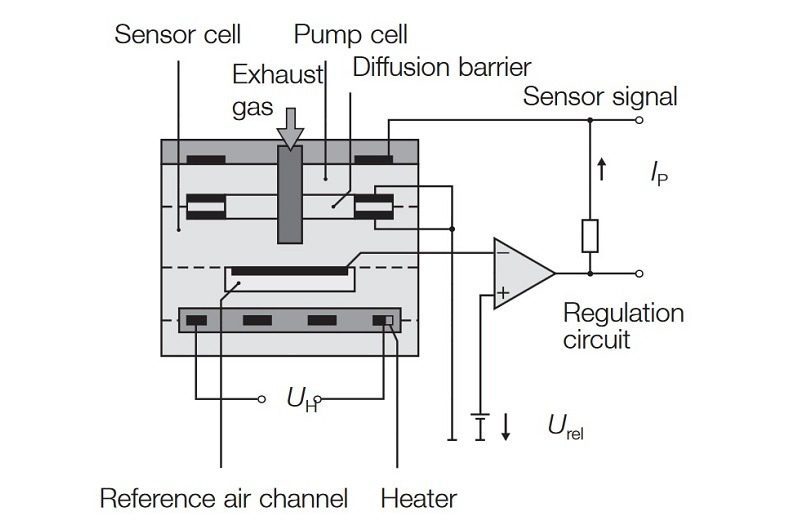
Khí thải đi vào khu vực đo thông qua một lỗ nhỏ trên tế bào bơm, được gọi là khe khuếch tán. Để thiết lập tỷ lệ không khí (λ), nồng độ oxy ở đây được so sánh với nồng độ oxy của không khí tham chiếu. Để nhận được tín hiệu có thể đo được cho bộ điều khiển, một điện áp được đặt vào tế bào bơm. Với điện áp này, oxy có thể được bơm từ khí thải vào hoặc ra khỏi khe khuếch tán. Bộ điều khiển điều chỉnh điện áp bơm sao cho tỷ lệ khí luôn ở mức λ = 1 trong khe khuếch tán. Nếu hỗn hợp loãng, oxy sẽ được bơm ra ngoài bằng tế bào bơm. Một dòng bơm dương là kết quả của việc này. Nếu hỗn hợp giàu, oxy sẽ được bơm vào trong từ không khí tham chiếu. Dòng bơm âm là kết quả của việc này. Tại λ = 1 trong khe khuếch tán, không có oxy nào được vận chuyển; dòng bơm bằng không. Dòng bơm này được bộ điều khiển đánh giá, cung cấp tỷ lệ không khí và do đó cung cấp thông tin về tỷ lệ không khí-nhiên liệu.
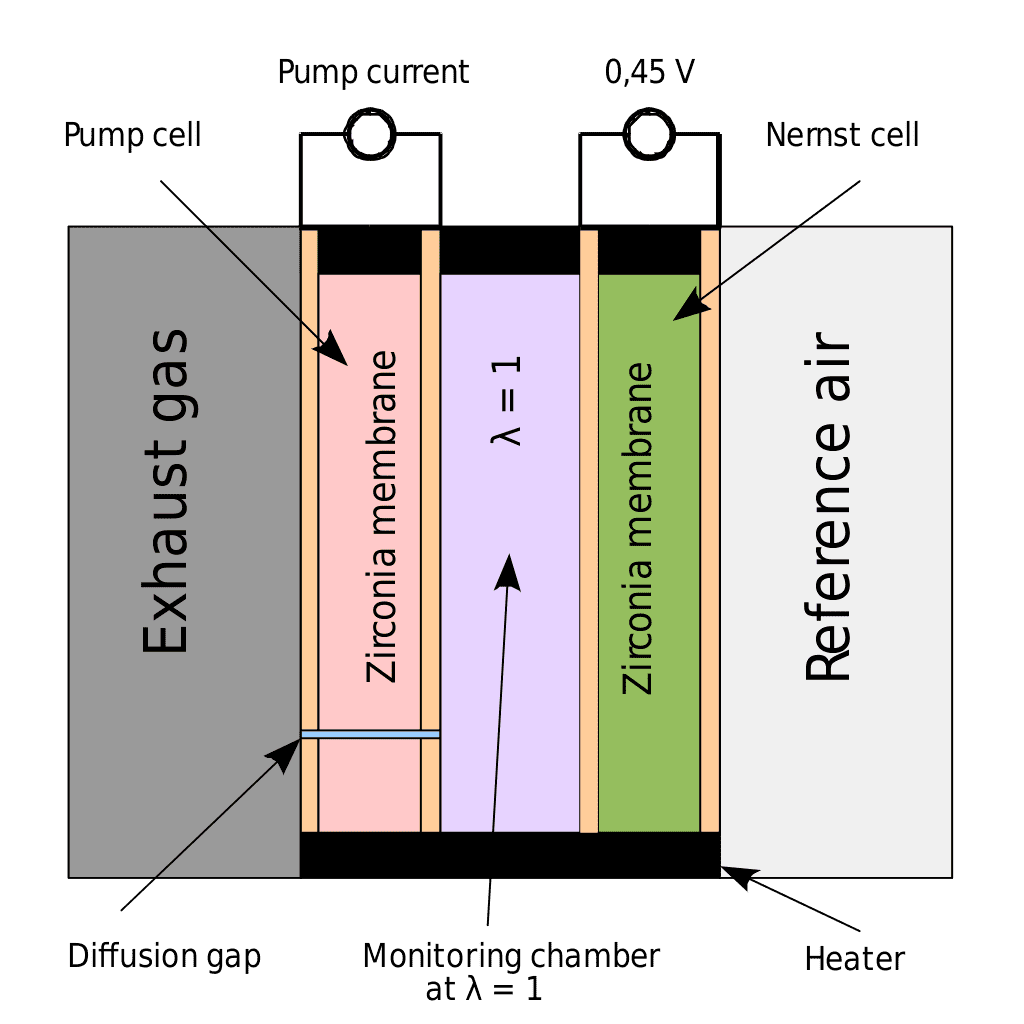
Cảm biến băng rộng có ba yếu tố:
- Bơm oxy ion,
- Cảm biến zirconia băng thông hẹp,
- Yếu tố gia nhiệt.
Sơ đồ nối dây cho cảm biến băng rộng thường có sáu dây:
- Bộ phận làm nóng điện trở,
- Bộ phận làm nóng điện trở,
- Cảm biến,
- Bơm,
- Điện trở hiệu chuẩn,
- Chung Common.
Sử dụng nhiều cảm biến lambda
Kể từ khi EOBD được giới thiệu, chức năng của bộ chuyển đổi xúc tác cũng phải được giám sát. Một cảm biến lambda bổ sung được lắp đặt phía sau bộ chuyển đổi xúc (hạ lưu) tác để thực hiện việc này. Điều này được sử dụng để xác định khả năng lưu trữ oxy của bộ chuyển đổi xúc tác.
Chức năng của đầu dò hạ lưu bộ chuyển đổi xúc tác cũng giống như đầu dò thượng lưu. Biên độ của cảm biến lambda được so sánh trong bộ điều khiển. Biên độ điện áp của đầu dò hạ lưu rất nhỏ do khả năng lưu trữ oxy của bộ chuyển đổi xúc tác. Dung lượng lưu trữ của bộ chuyển đổi xúc tác càng thấp thì biên độ điện áp của đầu dò hạ lưu càng cao do hàm lượng oxy tăng.
Độ cao của biên độ ở đầu dò hạ lưu phụ thuộc vào dung lượng lưu trữ thực tế của bộ chuyển đổi xúc tác, thay đổi tùy theo tải và tốc độ. Do đó, điều kiện tải và tốc độ được xem xét khi so sánh biên độ đầu dò. Nếu biên độ điện áp của cả hai đầu dò vẫn gần như nhau thì dung lượng lưu trữ của bộ chuyển đổi xúc tác đã đạt đến, ví dụ: thông qua quá trình lão hóa.
Triệu chứng hư hỏng cảm biến Lambda
Cảm biến lambda bị lỗi có thể gây ra các triệu chứng sau:
Tiêu thụ nhiên liệu cao
Hiệu suất động cơ kém
Lượng khí thải cao
Đèn báo động cơ bật sáng
Mã lỗi xuất hiện.
Nguyên nhân hư hỏng cảm biến Lambda
- Ngắn mạch bên trong và bên ngoài
- Không có nguồn điện/nối đất
- Quá nhiệt
- Cặn/ô nhiễm
- Thiệt hại cơ học
- Sử dụng nhiên liệu/phụ gia có chì






{kind=link}
Discussion about this post